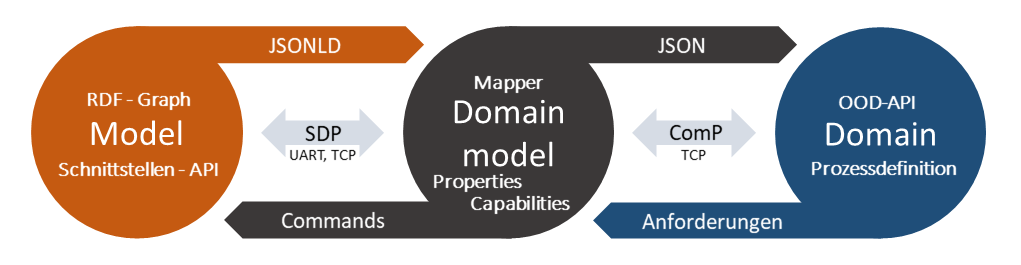
Through the mechanisms of the Semantic Web, it is possible not only to describe web content syntactically but also to relate it semantically. The properties and capabilities of hardware, instead, are hidden in documents, code documentations, repository descriptions, etc. Semantic Plug & Play presents a methodology and architecture that can be used to describe and relate the properties and capabilities of hardware. The decentralized storage of the descriptions on a hardware adapter allows the information to be evaluated at runtime. For domainspecific applications a Model-Domain-Domainmodel Architecture (MDDM) is included so that code can also be executed at runtime using these hardware descriptions.
Download
The main characteristic of the ontology is the division between descriptive properties of hardware elements and the executable capabilities. Properties can be device specific, such as the weight of a temperature sensor module, but they can also describe capabilities in more detail, such as the fact that the temperature sensor measures in degrees Celsius. The granularity of the properties is explicitly not firmly defined, since the sensor data and the necessary selfdescriptions are highly domain-specific.
Download View Specification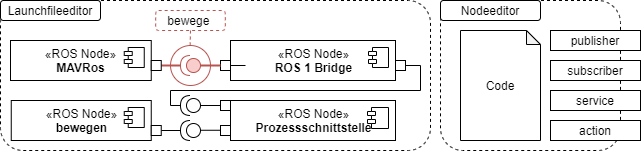
The Robot Operating System (ROS) offers developers a large number of ready-made packages for developing robot programs. The multitude of packages and the different interfaces or adapters is also the reason why ROS projects often tend to become confusing. Concepts of model-driven software development using a domain-specific modeling language could counteract this and at the same time speed up the development process of such projects. This is investigated by transferring the core concepts from ROS 2 into a graphical programming interface.
Download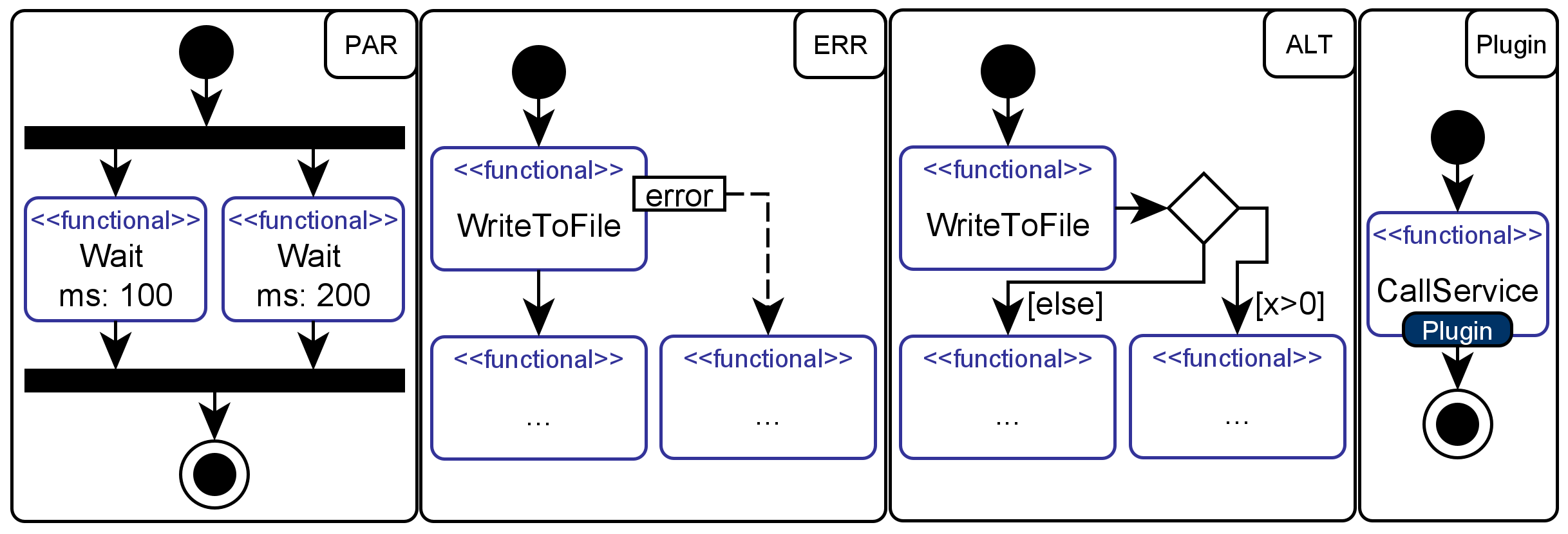
BDL is a modular and extinsible mission planning framework for one or more agents. It can be used to define, deploy and execute missions (tasks) to one or multiple devices. In this repository extensions for interfacing with ROS and ROS2 are provided as well as a plugin for synchronizing multiple agents via barriers. The Framework also provides a simple way to integrate sensors and sensor data by providing a library that allows automatic integration of simple sensors into the system.
DownloadImpressum
Angaben gemäß § 5 TMG
Constantin Wanninger
Georg-Brach-Str. 8
86152 Augsburg
Kontakt:
Telefon: 0049-1631733238
E-Mail: c.wanninger@gmx.net